
Rappels
L’étude du mouvement d’un système est complexe, car tous les points qui le constituent se déplacent. Pour faciliter ce travail, il faut choisir un point particulier de cet objet. En général, les objets étudiés sont des solides.
A) Le repère d’espace
On choisit un référentiel et on associe un repère d’espace, afin d’analyser son mouvement à différents instants : on utilise alors les coordonnées de ce point.
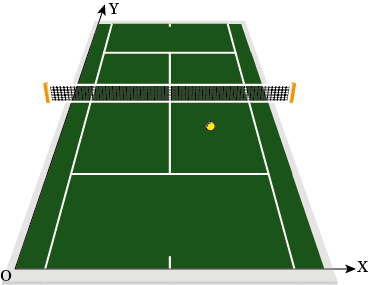
Lorsque le mouvement se déroule dans un plan, on utilise un repère d’espace (Oxy). Il est constitué d’une origine et de 2 axes orthonormés. Les axes orthogonaux sont gradués en mètre et le point a 2 coordonnées : x et y.
Un repère sert par exemple à localiser la balle de tennis sur un court et ainsi calculer sa vitesse.
B) Le repère de temps
Pour analyser le mouvement à différents instants, on associe aux coordonnées du point étudié une date t s’exprimant en seconde. On choisit une origine des temps. Ainsi, la date est le temps écoulé depuis l’origine des temps. La durée, notée ∆t, est l’intervalle de temps entre 2 dates.
C La trajectoire
Lorsqu’un point se déplace, il passe par différentes positions. La trajectoire est l’ensemble des positions occupées successivement au cours du mouvement. Elle forme une courbe orientée.
Les mouvements peuvent être très divers :
lorsque la trajectoire du point est une droite, la trajectoire et le mouvement sont dits rectilignes ;
lorsque la trajectoire du point est un cercle, la trajectoire et le mouvement sont dits circulaires ;
dans le cas général, la trajectoire forme une courbe quelconque, la trajectoire et le mouvement sont dits curvilignes.
Un exemple de trajectoire rectiligne :
Remarque
Ici, les points sont séparés d’une même distance.
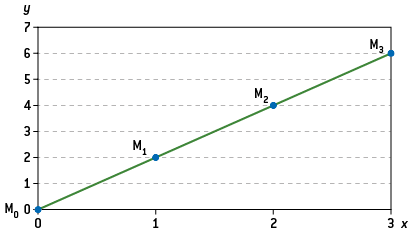
Les points marqués en bleu correspondent aux positions d’un point M d’un solide à intervalles de temps réguliers. Comme l’enregistrement a été réalisé dans un repère d’espace, on peut en plus attribuer à chaque point des coordonnées : M0 a pour coordonnées x = 0 m et y = 0 m, donc le point M part de l’origine et M1 a pour coordonnées x = 1 m et y = 2 m.
D) Le référentiel
Un référentiel est un objet qui permet de repérer les positions successives d’un point d’un solide dont on étudie le mouvement. Le choix de ce référentiel est important, car la trajectoire d’un point mobile sera différente selon le référentiel. On utilise souvent un point du laboratoire : le référentiel est alors appelé « référentiel du laboratoire » ou un point de la Terre, c’est alors le « référentiel terrestre ».
E Les mouvements de translation
Un solide adopte un mouvement de translation, lorsque tout segment de ce solide reste parallèle à lui-même au cours du mouvement.
Par exemple, la plupart des points extérieurs d’une automobile (excepté les roues) sont en translation au cours d’un déplacement rectiligne. Dans une grande roue, les nacelles sont aussi en translation car elles sont toujours dans la même position par rapport au sol.
Le mouvement d’un solide en translation peut être assimilé à celui de son centre d’inertie G concentrant toute la masse du système.
La vitesse
A) La vitesse d’un solide
La vitesse moyenne vmoy d’un point est le rapport de la distance d parcourue par le point par la durée ∆t nécessaire pour la parcourir :

La vitesse s’exprime en mètre par seconde (m.s–1). Dans la vie courante, on utilise plutôt le kilomètre par heure (km.h–1). On peut facilement convertir une vitesse exprimée en mètre par seconde en une vitesse en kilomètre par heure en utilisant un facteur 3,6 et réciproquement : v en km.h–1 = 3,6 × v en m.s–1 et v en m.s–1 = en km.h–1.
Exemple
Une balle de tennis au service a une vitesse v = 221 km.h–1. Quelle est la valeur en m.s–1 ?
Pour obtenir la valeur en m.s–1, il faut diviser la vitesse exprimée en km.h–1 par 3,6. Ainsi, la vitesse vaut = 61 m.s–1.
La vitesse v d’un point est la vitesse instantanée du point. C’est le rapport de la distance d parcourue par le point par une durée ∆t infiniment petite nécessaire pour la parcourir.
Ainsi, la vitesse v est la limite de la vitesse moyenne lorsque ∆t tend vers 0.
Si on note x la position du point sur un axe, c’est donc mathématiquement la dérivée de la position x par rapport au temps. v = lim∆t→0 vmoy = lim∆t→0 = .
Remarque
Cette remarque concerne uniquement la filière STL.
Dans le cas d’un mouvement plan, le vecteur position (x, y) et le vecteur vitesse (vx, vy) ont deux coordonnées. L’abscisse du vecteur vitesse vx est la dérivée de l’abscisse du vecteur position par rapport au temps vx = et l’ordonnée du vecteur vitesse vy est la dérivée de l’ordonnée du vecteur position par rapport au temps vy = .
Le vecteur vitesse v est la dérivée du vecteur position par rapport au temps : =
Si on dispose d’une courbe indiquant la position au cours du temps, la vitesse à une date donnée est la pente de la tangente à la courbe pour cette date.
B) L’évolution de la vitesse
Lorsque la vitesse d’un point ne varie pas, elle est constante : le mouvement est dit uniforme et la vitesse est égale à la vitesse moyenne. Par contre, on dit qu’il est accéléré si la valeur de la vitesse du point augmente au cours du temps et décéléré si la valeur de la vitesse du point diminue au cours du temps.
Exemple
Les mouvements d’un point d’un solide se déplaçant selon un mouvement rectiligne de gauche à droite ont été enregistrés à intervalles de temps réguliers (∆t identiques entre les 3 enregistrements) reproduits ci-dessous :

Enregistrement 1 : points régulièrement espacés ; c’est un mouvement rectiligne uniforme.
Enregistrement 2 : points de plus en plus espacés ; c’est un mouvement rectiligne accéléré.
Enregistrement 3 : points de plus en plus proches ; c’est un mouvement rectiligne décéléré.
C) L’accélération
L’accélération moyenne, notée amoy, est liée à la variation de la vitesse ∆v et à la durée ∆t.

Exemple
Les constructeurs automobiles donnent souvent une indication de l’accélération de leurs véhicules sous la forme : « de 0 à 100 km.h–1 en 4,5 secondes ».
Le calcul de l’accélération peut être réalisé, car on dispose d’une variation de vitesse ∆v = 100 km.h–1 et d’une durée ∆t = 4,5 s.
On convertit la variation de vitesse en m.s–1 : ∆v = = 28 m.s–1, ainsi l’accélération est a = , soit a = = 6,0 m.s–2. Cette voiture est puissante.
Remarque
Ordres de grandeurs
Un coureur au démarrage d’un sprint a une accélération a = 5 m.s–2.
Une bille d’acier lâchée dans l’air a une accélération a = 10 m.s–2.
Un avion de ligne a, au décollage, une accélération a = 6 m.s–2.
Au décollage, une fusée a une accélération a = 50 m.s–2. Les cosmonautes doivent avoir une condition physique et un entraînement spécifiques pour résister à cette accélération.
L’accélération d’un point est l’accélération instantanée du point. C’est le rapport de la variation de vitesse Δv par une durée ∆t infiniment petite.
Ainsi, l’accélération a est la limite de l’accélération moyenne amoy lorsque ∆t tend vers 0. C’est donc mathématiquement la dérivée de la variation de vitesse Δv par rapport au temps : a = lim∆t→0 amoy = lim∆t→0 = .
Si on dispose d’une courbe indiquant la vitesse au cours du temps, l’accélération à une date donnée est la pente de la tangente à la courbe pour cette date.
D) Le cas d’un mouvement rectiligne uniformément accéléré
Lorsque l’accélération a est constante sur un axe, alors la vitesse est une fonction affine ou linéaire du temps. En effet, la dérivée d’une fonction affine ou linéaire est une constante.
Remarque
Les parties D et E concernent uniquement la filière STL.
Ainsi, v = a0 × t + C où C est une constante réelle qui peut être déterminée en connaissant la valeur de la vitesse à une date t donnée.
Exemple
a = 2,0 m.s–2 et la vitesse v vaut 3,0 m.s–1 à la date t = 0 s.
La vitesse s’écrit v = 2 t + C, or à t = 0, v = 3,0 m.s–1, donc en remplaçant t par 0, on obtient v = 2 × 0 + C = 3,0, ainsi on détermine la constante C = 3,0 m.s–1. La vitesse s’écrit donc v = 2 t + 3,0, c’est une équation horaire de type affine.
E) La méthode d’Euler
a) Le principe
En connaissant une loi de vitesse en fonction du temps, il est possible de construire une approximation des positions occupées successivement en augmentant le temps d’une même valeur.
En prenant l’équation précédente de vitesse sur un axe x, vx = 2 t + 3,0 et en tenant compte du fait que vx = , on peut écrire = 2 t + 3,0. C’est une équation différentielle, dans laquelle on remarque la présence de , la dérivée de la position par rapport au temps. Or, un nombre dérivé est le coefficient de la tangente à la courbe au temps considéré, donc en prenant des petits intervalles de temps identiques que l’on appelle incréments de temps, on peut trouver l’évolution de la position au cours du temps.
b) L’aspect mathématique
Soit y = f(x) la fonction considérée (supposée continue et dérivable), la valeur de la dérivée au point xo est obtenue par : f′(x0) = limh→0 avec h une petite variation de x, alors f(x0+h) ≈ f(x0) + h.f′(x0).
En posant x1 = x0 + h, on obtient : y1 = f(x1) ≈ f(x0) + h.f′(x0). De même f(x1+h) ≈ f(x1) + h.f′(x1).
En posant x2 = x1 + h, on obtient : y2 = f(x2) ≈ f(x1) + h.f′(x1). En généralisant, on obtient : yn = f(xn) ≈ f(xn–1) + h.f′(xn–1)
Pour h voisin de 0, les points M (xn ; yn) sont plus proches de la courbe. Plus la valeur h est petite, meilleur est le résultat mais plus il faut faire de calcul. Il faut donc connaître la valeur initiale de la fonction et on trouve les points suivants par itération.
Graphiquement, f′(x0) est la valeur du coefficient directeur de la tangente (T) à la courbe au point M0. Le point M1 de la courbe est tel que y(M1) = f(x1) = f(x0 + h).
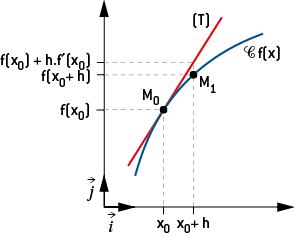
Sur le graphe apparaît l’écart entre f(x0 + h) et f(x0) + h.f′(x0). Il est donc nécessaire que l’incrément h soit le plus petit possible pour que la fonction calculée soit la plus proche possible de la primitive recherchée.
c) L’application aux situations physiques de la méthode d’Euler
La fonction mathématique y = f(x) est remplacée par une fonction temporelle x(t) et h est remplacé par l’incrément de temps Δt. On peut alors écrire :
x(ti+1) = x(ti) + Δt × (ti) = x(ti) + Δt × v(ti) avec v(ti) vitesse à la date ti
La connaissance des grandeurs à la date ti permet de déterminer la situation à la date ti+1. Par récurrence on détermine ainsi les valeurs successives. Il faut donc connaître la valeur à la date x(t = 0) : condition initiale de position et l’expression de la dérivée (0) à cette date.
Si on revient sur = 2 t + 3,0, il faut définir une condition initiale x(0) = 0 et un incrément de temps Δt = 0,10 s.
On calcule alors = 2 × 0 + 3,0 = 3,0 m.s–1, ce qui permet de trouver :
x(0 + Δt) = x(0) + Δt × = 0 + 0,10 × 3,0 = 0,30 m
On continue = 2 × 0,10 + 3,0 = 3,2 m.s–1, ce qui permet de trouver :
x(0,20) = x(0,10) + Δt × = 0,30 + 0,10 × 3,2 = 0,62 m
Ce travail est mené jusqu’à la date choisie. Si on souhaite trouver la position au bout de 2,0 secondes, il faudra recommencer les calculs 20 fois . Ce qui est fastidieux : l’idéal est donc d’utiliser un tableur.